ARCHITECTURE
Le bus 1394 accepte plusieurs sorte de topologie pour son réseau : en chaîne, en arbre, en étoile ou une combinaison de toutes ces topologies. La seule restriction est qu'il ne faut pas avoir plus de 16 câbles entre deux appareils. On peut connecter à un tel réseau 63 appareils.
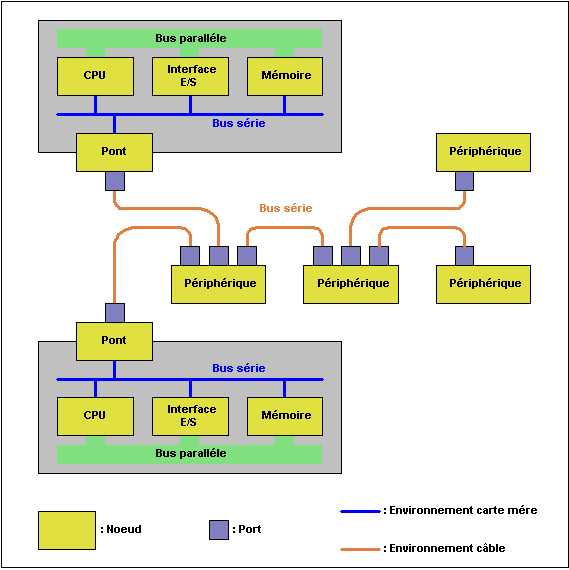
schéma de la topologie
Durant la phase d'initialisation, chaque appareil connecté au bus 1394 annonce, à tour de rôle, leur identification et leur configuration et reçoive en retour une adresse qui leur est propre. Ce procédé d'énumération et d'attribution d'adresse s'effectue automatiquement. Ainsi, on peut connecter à chaud un nouvel élément au bus. Le bus 1394 est donc plug-and-play.
L'IEEE 1394 utilise une technologie de transmission de donnée par paquets qui est organisée comme si c'était un espace mémoire interconnecté avec plusieurs appareils. La topologie d'un réseau I/O 1394 est constitué de deux couches : une couche physique (communément appelée PHY) et une couche de lien. Il y a également deux couches logiciel : une couche de transaction et une couche de gestion du bus série. Ces couches logiciel peuvent être directement intégrées en "hard". La couche PHY doit gérer le signal de mise sous tension à distance, la reconnaissance du signal de sélection de l'appareil, le signal d'initialisation du bus et la réception/émission des données. La couche de lien formate les données en paquets pour la transmission via le câble 1394 et supporte les modes de communication asynchrone et isochrone.
La vitesse de transmission via le bus 1394 dépend de l'électronique de la couche PHY. Généralement, l'électronique de la couche PHY support des vitesses de 100Mb/s, 200Mb/s et 400Mb/s.
Pour ce rendre mieux compte de ce débit, prenons notre exemple de la vidéo conférence. Six standards ont été choisit pour le 1394, basées sur différentes considérations : la taille des images, le débit et la taille des paquets dépendant du mode de l'image. Pour un standard de haute qualité, on transmet 30 images par secondes (l'œil humain n'en perçoit que 25). Chaque image a une résolution. de 640x480 pixels et chaque pixel est codé sur 24 bits (ce qui représente à peut près une palette de 16 millions de couleurs). Cette qualité exige un taux de transfert de 240Mb/s. On comprend donc aisément que ce bus est de plus en plus utilisé pour le matériel vidéo vu la possibilité d'atteindre une très haute qualité.
Elle définit deux modes de communication : asynchrone et isochrone.
Le mode de transmission asynchrone garanti la bonne réception des données car la cible envoi, dès la réception d'un paquet, un signal de reconnaissance immédiatement à l'envoyeur. Ce temps de latence ne peut pas être quantifier car il dépend de taux d'utilisation du bus 1394 par d'autres transmissions pour d'autres appareils communicants entre eux. Ce paquet de données peut être envoyé à une adresse d'un appareil connecté au réseau ou à toutes les adresses. Par contre, on ne peut envoyer un paquet à une branche (sous-ensemble) du réseau.
Le mode de transmission isochrone est différent. Il réserve, pour la transmission, un espace-temps de dimension particulière et cyclique, toutes les 125µs (soit 8000 cycles isochrones par seconde). Depuis un appareil, un espace-temps isochrone est garanti. Les communications isochrones sont prioritaires aux asynchrones de sorte que la bande passante pour les communications isochrones est assurée. Ainsi, la communication isochrone entre deux appareils ou plus est assimilable à un canal. Une fois qu'un canal a été établit, l'appareil demandeur est garanti d'avoir espace-temps demandé à chaque cycle. Seulement un appareil peut émettre sur son canal mais ce canal peut être reçu par plusieurs appareils. Plusieurs canaux peuvent être réservés pour un seul appareil et des canaux supplémentaires peuvent lui être ajoutés tant que la capacité d'émission isochrone de l'appareil n'est pas atteinte et que la bande passante isochrone du bus 1394 est disponible. C'est ce mode de transmission que l'on choisit pour le transport de données vidéo ou toutes autres données qui ont besoin d'avoir une transmission garantie en "temps réel".
Différents appareils peuvent être connectés au bus 1394. Ils varient selon leur complexité et leur capacité. On peut les classer en cinq catégories du plus simple au plus compliqué (dans le mot appareil, je parle en fait d'une partie d'un tout, c'est-à-dire que le tout est par exemple une camera et l'appareil son système de communication et de rattachement au bus).
Si un appareil est capable de communiquer, il est capable de répondre à une communication asynchrone et doit comprendre des registres de contrôle de statuts (CSR) et un ROM de configuration minimale.
Les appareils capables de communication isochrone ajoute une horloge de 24,576MHz qui incrémente le registre du cycle d'horloge qui est lui-même mise à jour par le départ du cycle de réception des paquets par le bus 1394 provenant de l'appareil "master-cycle".
Les appareils "master-cycle" (cycle principal) ont l'aptitude de produire le départ du cycle à 8KHz, générer le départ du cycle des paquets et de rendre effectif le registre d'horloge du bus.
Les appareils IRM (Isochronous Resource Manager) font toutes les opérations ci-dessus. De plus ils détectent les mauvaises adresses de paquets, déterminent l'adresse de l'appareil pour l'IRM choisit, et gèrent les canaux libres, la bande-passante disponible, et le registre des adresses.
Les appareils ayant la fonction BM (bus manager) doivent gérer le bus. C'est la fonction la plus complexe. Ce niveau ajoute la responsabilité de stocker chaque auto allocation d'adresse d'un appareil dans une carte de topologie du réseau et d'analyser cette carte pour fournir une nouvelle carte de vitesse du bus. Finalement, le BM doit pouvoir activer l'appareil "master-cycle", écrire la configuration du PHY pour le format des paquets pour permettre l'optimisation du bus, et peut gère l'alimentation des appareils.
Pour qu'un réseau 1394 puisse gérer une communication isochrone, il est nécessaire d'avoir au moins un appareil IRM. Un PC ayant un processeur assez rapide avec un mémoire suffisante est le candidat idéal pour gérer le réseau 1394.
Les champs de contrôles et de données sont protégés par un CRC détectant une erreur simple ou double.
La correction d'erreur est basée sur un mécanisme de retransmission d'envois erronés. Une retransmission peut être effectuée jusqu'à deux fois avant qu'une erreur soit déclarée.
Par ailleurs, tout délai dans le démarrage du cycle est indiqué dans le cycle start suivant et compensé.